- Define the new coordinate system by a point (in new sketch)
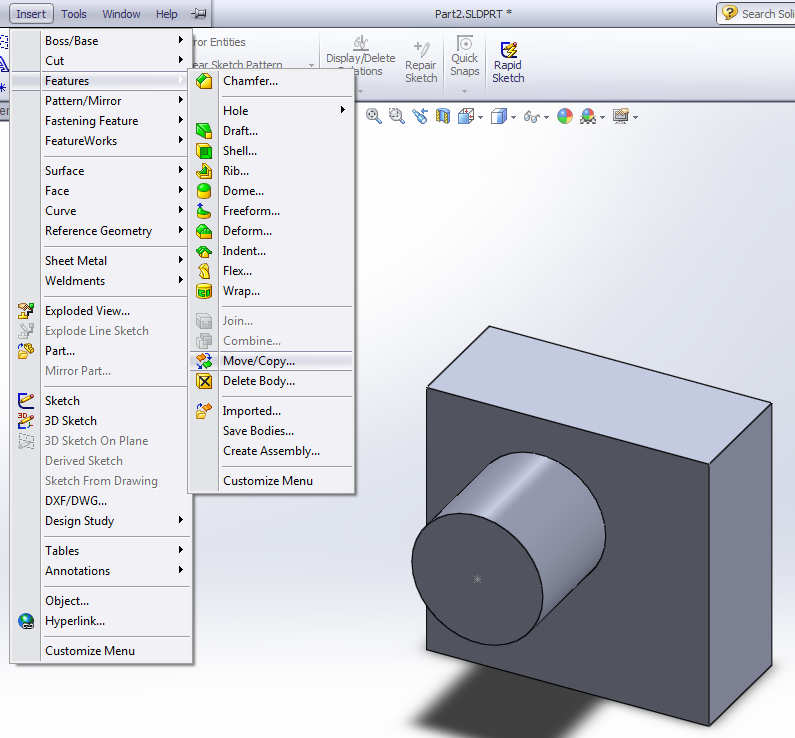
- Select move/copy in the insert
- select the body to move
- select the new point (in step 1)
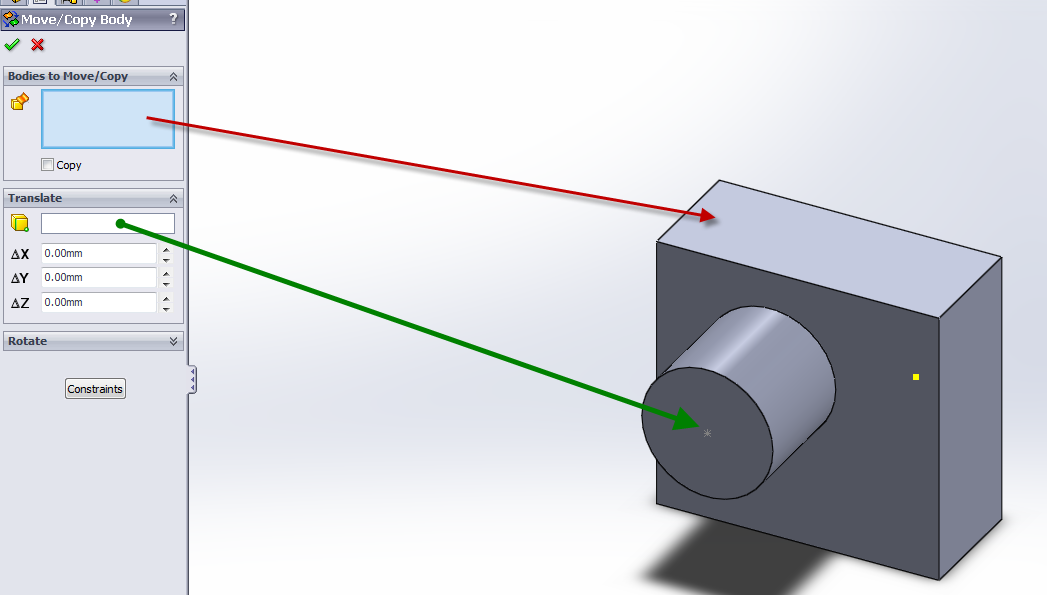
- in the lower box: select the origin point
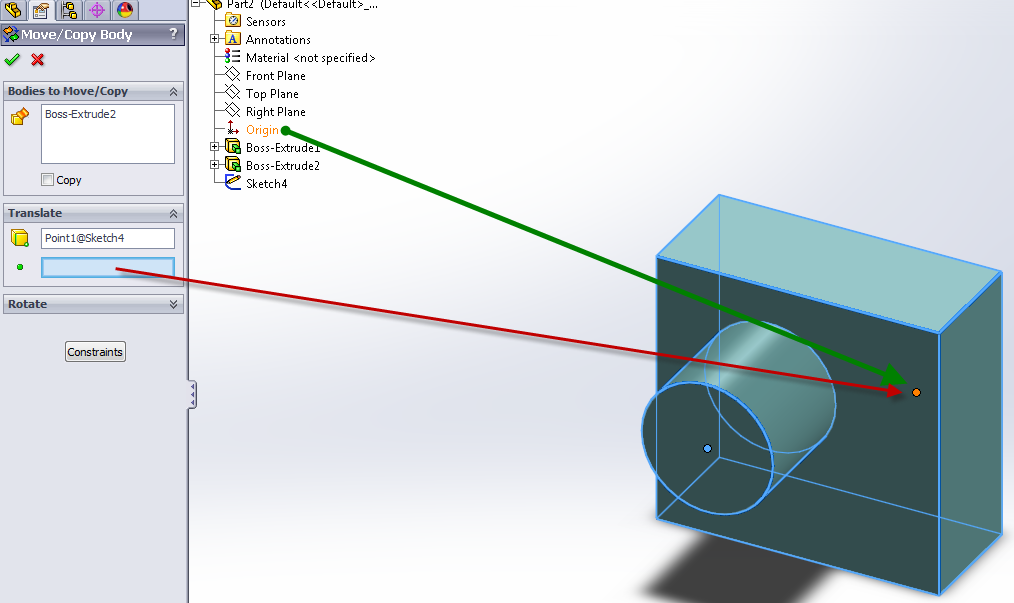
- now the new origin defined at the new define point (step1)
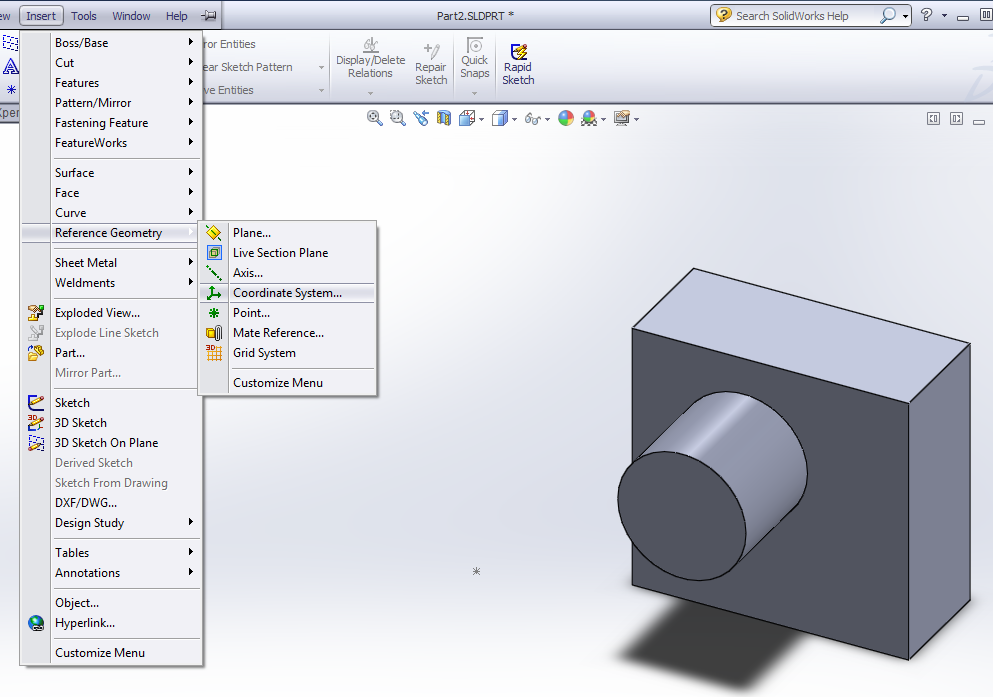
- at this step we will add the coordinate system
note:
if we want apply for assembly part. save as part.
1 comment:
Em vẽ tay robot 3 bậc RRP nhưng sao khớp tính tiến lúc xuất qua matlab nó không hiểu tịnh tiến mà nó hiểu bị hàn cứng không biết khắc phục thế nào a?
Post a Comment