1. Creating new window form application by Microsoft visual studio 2010 ( C#)
And using rcb4 and extensions.Collections in main program (see Fig1)
3. Create the interface for the program
.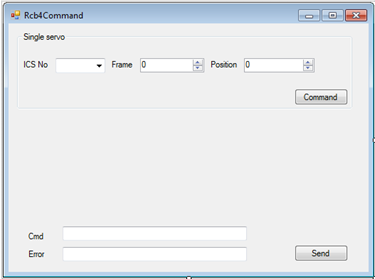
(Test with control 1 motor servo)
Chose ICS No, Frame, Position, and click Command -> Send.
4. Wite the Command function
- When Command button is pressed, the command for kondo is generated
- And shown in the Text box Cmd
- Send button to send the command to rcb4
5. Setup a serialPort1
BaudRate: 1250000
Parity: Even
Insert the SerialPort1 from the Toolbox, and depend on the Com number port ( when install the KondoSerial ) ( down file here KO Driver 2013 ) 
public partial class Form1 : Form
{
//Manage the number of data receiving
int recv_count = 0;
public Form1()
{
InitializeComponent();
}
// opem a COM port
private void Form1_Load(object sender, EventArgs e)
{
if (!serialPort1.IsOpen)
{
serialPort1.Open();
}
}
// close the serial port when close the form
private void Form1_FormClosing(object sender, FormClosingEventArgs e)
{
if (serialPort1.IsOpen)
{
serialPort1.Close(); // Close the serial port
}
}
#region single servo
// when the command button is pressed, the command is generated and showning
// in the cmd textbox.
private void ssbtnCommand_Click(object sender, EventArgs e)
{
ByteList cmd = new ByteList(); // creat the new cmd
cmd.Bytes = Command.RunSingleServo((byte)cmdssICSMotor.SelectedIndex, (byte)nmssFrame.Value, (int)nmssPosition.Value);
// shown the generation command in the cmd textbox
txtCmd.Text = cmd.CommaText;
// required when you actually send the command, to keep the number of received data
//recv_count
recv_count = 4;
}
#endregion single servo
#region SendCommand
// send the geniration command to rcb4
private void btnSend_Click(object sender, EventArgs e)
{
// check the Com port
if (!serialPort1.IsOpen)
{
MessageBox.Show("Com port is not connected"); // Return if Comport is not connected
return;
}
// check the cmd box
if (txtCmd.Text == string.Empty)
{
MessageBox.Show("Command has not been generated"); // Return if cmd box is empty
return;
}
//send generation command
ByteList cmd = new ByteList();
cmd.CommaText = txtCmd.Text; // get text from the Cmd box
// received Array is reply
byte[] recv = new byte[recv_count];
bool result = Command.Synchronize(serialPort1, cmd.Bytes, ref recv);
// check the result after click send button
if (result == true)
{
txtError.BackColor = SystemColors.Window;
}
else
{
txtError.BackColor = Color.Red;
}
// get the reply ByteList
cmd.Bytes = recv;
// Write the answer in the error textBox
txtError.Text = cmd.CommaText;
}
#endregion SendCommand
}
No comments:
Post a Comment