
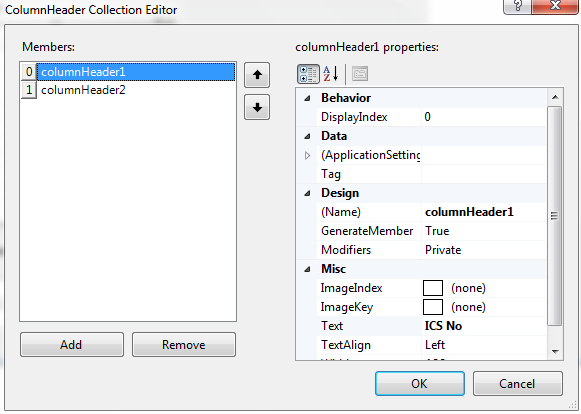
in the list view, add two column (ics no and position)
Create the list servo in rcb4.dll by manual
//initial setting
private void Form1_Shown(object sender, EventArgs e)
{
// make a list of servo in listView
lisVICSmotor.Items.Clear();
//search all secvor
for (int i = 0; i < Rcb4.Rcb4.MaxDeviceNumner; i++)
{
ListViewItem item = new ListViewItem(new string[] {i.ToString ("00"),"7500" });
lisVICSmotor.Items.Add(item);
}
}
|
for check list view ( when selected index changed and position value changed)
//when the servo motor selection column is clicked
private void lisVICSmotor_SelectedIndexChanged(object sender, EventArgs e)
{
// when nothing is slelected
if (lisVICSmotor.SelectedIndices.Count ==0)
{
return;
}
// get the number of the selected list
int sindex = lisVICSmotor.SelectedIndices[0];
//should chose 1 time, gets the curently position
nmmsPosition.Value = Convert.ToInt32(lisVICSmotor.Items[sindex].SubItems[1].Text);
}
// when the value of nmmsPosition has changed, list data is updated
private void nmmsPosition_ValueChanged(object sender, EventArgs e)
{
//exit when no coonection
if (lisVICSmotor.SelectedIndices.Count ==0)
{
return;
}
//get the list number that is selected
int sindex = lisVICSmotor.SelectedIndices[0]; // chose 1
//set the position into listview[position]
lisVICSmotor.Items[sindex].SubItems[1].Text = nmmsPosition.Value.ToString();
}
|
for creating command to control multiple servo motor
//generated the command to control multiple servo motor
// when click command button
private void btnmsCommand_Click(object sender, EventArgs e)
{
//make the command
System.Collections.Generic.Dictionary<int, int> icsList = new Dictionary<int, int>();
//register the number of frame, here set -1 to frame value
//note allways have
icsList.Add(-1, (int)nmmsFrame.Value);
//remove the data of id that is checked from the list view to the listing
foreach (ListViewItem item in lisVICSmotor.Items)
{
if (item.Checked)
{
try
{
int icsNo = int.Parse(item.SubItems[0].Text);
int pos = int.Parse (item.SubItems[1].Text);
icsList.Add(icsNo,pos);
}
catch
{
//do not anythinh
continue;
}
}
}
//generate a command
ByteList cmd = new ByteList();
//System.Collections.Generic.Dictionary<int, int> icsList
cmd.Bytes = Command.RunConstFrameServo(icsList);
//show in the cmd textbox
txtCmd.Text = cmd.CommaText;
recv_count = 4;
}
|
Send the generation command
//generated the command to control multiple servo motor
// when click command button
private void btnmsCommand_Click(object sender, EventArgs e)
{
//make the command
System.Collections.Generic.Dictionary<int, int> icsList = new Dictionary<int, int>();
//register the number of frame, here set -1 to frame value
//note allways have
icsList.Add(-1, (int)nmmsFrame.Value);
//remove the data of id that is checked from the list view to the listing
foreach (ListViewItem item in lisVICSmotor.Items)
{
if (item.Checked)
{
try
{
int icsNo = int.Parse(item.SubItems[0].Text);
int pos = int.Parse (item.SubItems[1].Text);
icsList.Add(icsNo,pos);
}
catch
{
//do not anythinh
continue;
}
}
}
//generate a command
ByteList cmd = new ByteList();
//System.Collections.Generic.Dictionary<int, int> icsList
cmd.Bytes = Command.RunConstFrameServo(icsList);
//show in the cmd textbox
txtCmd.Text = cmd.CommaText;
recv_count = 4;
}
|
1 comment:
i have some errors like 00 00 00 00 and the motor don't move to any grade only rotate, and i am not used to C#
Post a Comment